|
9月21日至23日,由重庆市科协、重庆大学、英国贝尔法斯特女王大学联合主办的2018国际前沿科技创新大会——智能制造及可持续能源会议在重庆召开。中国科学院宁波材料技术与工程研究所所属二级所先进制造技术研究所精密运动与先进机器人技术团队博士后王冲冲在研究员杨桂林的指导下完成的论文“Impedance Control of Flexible Joint Based on the Frequency Separated and Disturbance Observer Torque Control Scheme”获该会议最佳论文奖。
为了保证与人交互安全性的需求,下一代协作机器人往往采用轻量化的结构设计,并进行柔顺运动控制以提高机器人运动的柔顺性。机器人关节的轻量化设计中普遍采用轻质、高转动比的谐波减速器,由此带来关节柔性的增加,关节振动加剧。在关节柔顺控制中,动态载荷和非线性摩擦等干扰因素的存在,将导致关节柔顺控制性能下降。目前针对柔性关节的振动抑制,主要采用力矩反馈的方式提高控制系统的谐振频率,以达到振动抑制效果。理论上讲,力矩反馈系数越高,振动抑制效果越好;但是,在实际应用中,由于力矩信号的测量噪声,力矩反馈控制带宽无法提高。另外,通常采用的基于模型和干扰观测器的干扰补偿方法,由于动态载荷模型和非线性模型引起的模型不确定较大,导致观测器带宽受限。
针对以上问题,论文首先分析了柔性关节动力学响应特性并建立其动力学响应,在此基础上提出采用分频段力矩反馈的方法:高频段采用低增益的力矩反馈以避免力矩测量噪声的放大,以保证控制系统的稳定性;低频段力矩反馈控制器设计时将不再受到噪声和稳定性的限制,能够采用高增益的力矩反馈控制,这不仅能够提高系统的振动抑制能力,而且削弱了动态载荷和非线性摩擦的影响。分频力矩反馈闭环控制后的,对闭环后的系统采用干扰观测器,以进一步补偿干扰。闭环控制后的系统模型不确定性将大大减小,干扰观测器设计和实现简单,带宽提高。采用论文提出的控制方法,关节位置跟踪、阻抗控制和力跟踪性能均得到了提升:与传统方法相比,关节定位精度由0.001弧度提高到0.0002弧度,加减速过程关节振动幅度减小37%,对外力的敏感度提高约50%。
该论文得到了国家自然科学基金浙江省两化融合联合基金(U1509202),博士后面上基金(2016M601987)等项目支持。
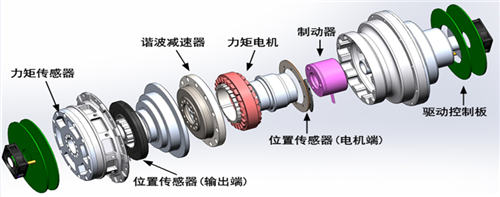
(a)
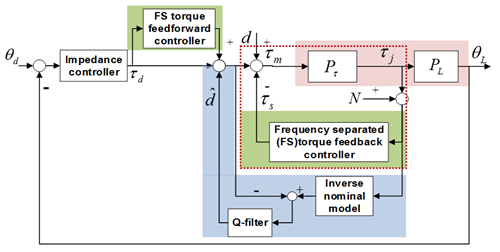
(b)
图1(a)关节模块的机械结构图;(b)分频力矩反馈结合干扰观测器的关节模块柔顺控制系统框图

图2 采用不同控制器的关节控制性能对比(左)关节位置跟踪效果;(右)关节阻抗控制效果。三种控制器分别为传统的力矩反馈PD控制器(黑色),分频力矩反馈PD控制器(蓝色),分频力矩反馈PD控制器结合干扰观测器(红色)。
(来源:中国科学院宁波材料技术与工程研究所)
|